WSN:Wireless Sensor Network
1
WSN与传统wireless network的区别
- 设计针对一项特殊任务
- 能量存储有限
- 网络结构设计是临时的,时变的
- 工作在恶劣环境
- 难以维修
- 部分节点失效不影响
- 无需控制中心指导
WSN面对的主要挑战
- Energy efficiency
- self-management
- limited communication range
- decentralized management
- limited resource (small memory, small CPU … )
- security
Medium Access Control
Contention-Free Protocols
基础知识
- 7 layer:Physical, Data Link, Network, Transport, Session, Presentation, Application.
- 数据包产生规律:泊松分布随机出现
TDMA
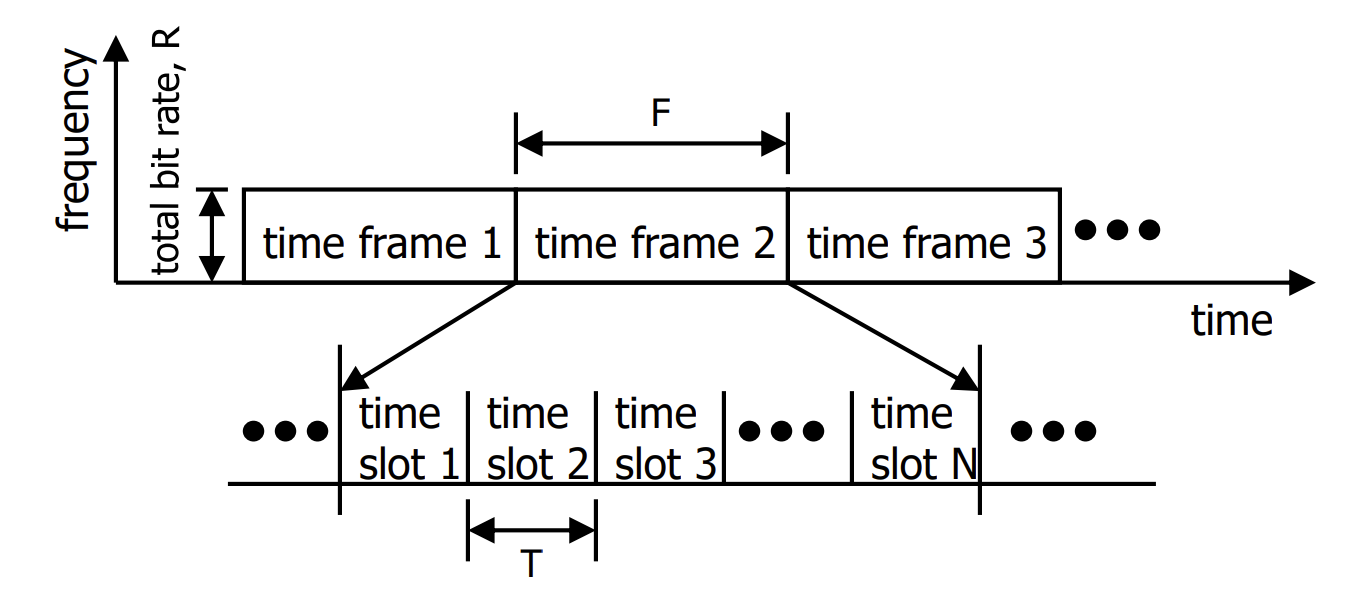
- 分成很多个time slot
- N: sensors
- T = P/R: packet transmission time
- P: packet size
- R: channel capacity(bps)
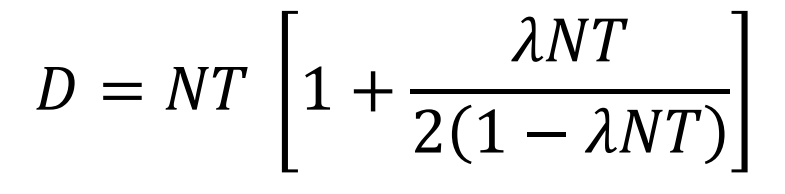
- D: access delay
- $\lambda=\frac{1}{T_0}$: Poisson average packet arrival rate
FDMA
一般还是TDMA延迟低
CDMA
- cdma的 G chip = 1 bit
Pe 和 Pb
- G:CDMA发送G次
- N:N nodes
- K:错几个算错,一般是一个bit(有时错一两个bit可以被修正,不影响packet error)
- P:package里有多少个bit
- $\gamma$:SINR 信噪比
- $P_b$:bit error probability
- $P_e$:packet error probability
Polling
Poll TDMA
Token Passing
pass token
Reservation-Based
first reservation and then data transmission
A: 110
B: 101
Contention-Based Prorocols
ALOHA
侏罗纪公园
直接发送,失败重发
成功率18%
slot-ALOHA
在指定的时间节点发送
成功率36%
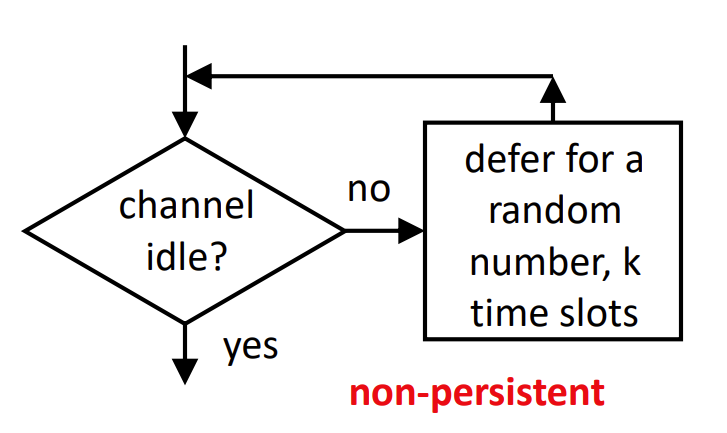
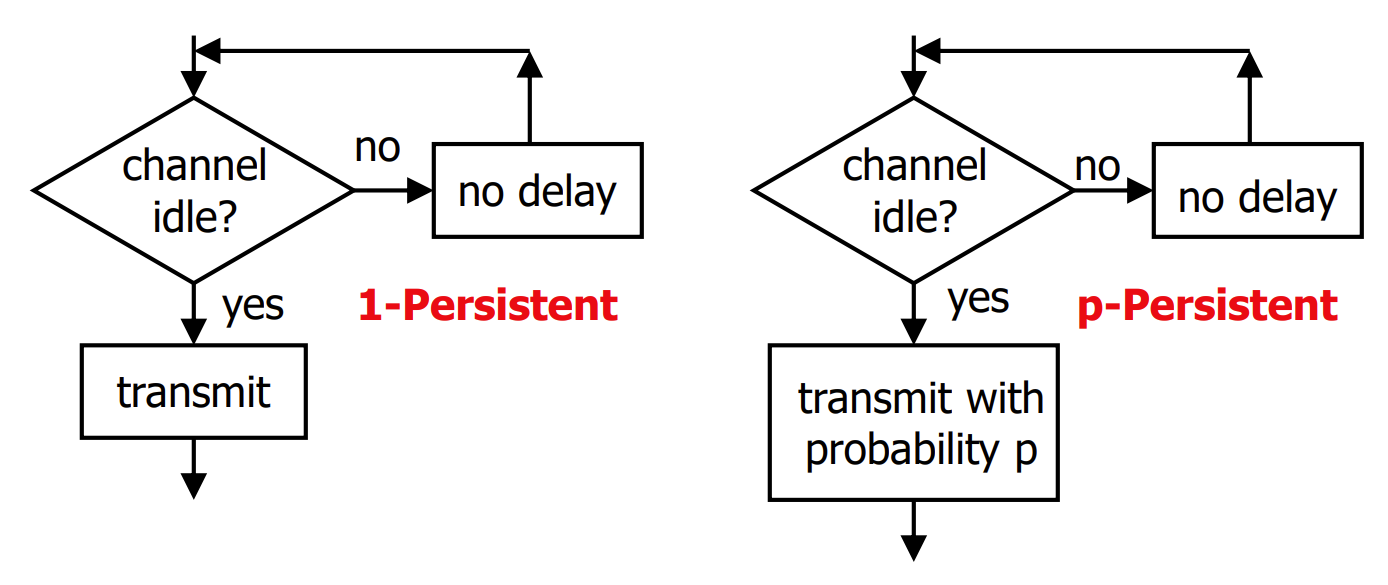
CSMA
Carrier Sense:发前吱一声看一眼
分三类:non-persistent, 1-persistent, and p-persistent
CSMA/CD(collision detection)
为啥实现不了
- 碰撞发生在传输的接收端,发送方将不会察觉到这个碰撞。
- half-duplex:不能同时发送和接收数据,因为发送数据声音很大,同一地点接收数据只能接收到自己发送的数据
CSMA/CA
类似 p-persistent CSMA,但是是等一段固定长度(DIFS)加一段随机长度的slot(back off period)再发送。
DIFS是频道在这一段时间都idle,
MACA
如果只查询自己能不能收到信号,只看一眼通道不行,有可能看不到的Hidden Node Problem
RTS/CTS
Exposed node problem:C可以给D发但是收到了B传给A的信号以为通道拥挤(解决:除非收到了隔壁的CTS才说明通道拥挤)
等一段时间,失败就加长等的时间
MACAW
- used data sensing(DS)package, send by sender after recieving CTS to inform other nodes of transmission duration.
- protect ACK: so that a neighboring sender node will not initiate its own transmission while other sender node is expecting its ACK.
发送数据前,获取发送数据权力的节点在接收到CTS后会发送数据长度。保证其他节点不会在此期间询问。
协议参数
- fairness
- energy efficiency
- dynamic power management
- low latency
- high reliability
- scalability
- adaptability
Routing Protocol
Network Organization
- Flat:all nodes are “equal”
- Hierarchical:different “roles” for different nodes.
- Location-based:nodes rely on location information to decide
Route Discovery
- Reactive(on-demand routing):find route only when needed
- Proactive:establish routes before they are needed
- Hybrid:protocols with reactive and proactive characteristics
Protocol Operation(not manditory)
- Negotiation-based:固定路径
- Multi-path:多路都可以
- QoS-based:最常见的,选最佳路
- Query-based:询问再发送
- Coherent-based:提前处理数据
Routing metrics
Dijsktra’s algorithm
Flooding and Gossiping
Flooding
是一种所有人都复读机的情况。
优点:
- simplicity
- guaranteed
缺点:
- heavy traffic
实际使用时有限制:传播次数上限(maximum hop counts);每人特殊标记(sequence numbers)
存在的问题:一个点复读两次同一个信息(Implosion:A node’s neighbors continue to rebroadcast a packet to the node even when it already has a copy);不同节点信息内容冗余(Overlap:Senor data contains redundant information);浪费资源(Resource blindness:Resource constraints are ignored)
Gossiping
- 是通过每人以一定概率不复读来解决Flooding的一些问题
- 存在的限制
- 只能解决Implosion
- 还需要确定参数p
Proactive Routing(table-driven routing)
DSDV(Destination-Sequenced Distance Vector)
- 每个点存:所有去向、最近节点、总路程、sequence number
- 添加节点和减少节点
- 为了解决减少节点的 looping problem,引入sequence number
- 解决好路慢问题(fluctuations),保存settling time在stable data里,等够两倍传播时间再更新网络。
- Install time?
OLSR(Optimized Link State Routing)
- 用neighbor sensing,定期发送HELLO更新连接状态
- 用flooding或MPRs
On-Demand Routing
区别在于,知道要找谁和谁的连接,定向找路径
Ad Hoc On-Demand Distance Vector (AODV):
用 hello 传 RREQ 和 RREP,传一通 RREQ 直到目标节点,目标节点回传 RREP,传回发送节点确立传递信息的节点通道。
特点:
- 只有在需要时才建立
- 平时不用存 table
- 初始化慢
Hierarchical Routing
cluster形式的网络,需要选 head,怎么选head就是个问题
Low-Energy Adaptive Clustering Hierarchy (LEACH)
。。。没总结了,老师好像没考
Location-Based Routing
Landmark Routing
找周围一次能到的节点、两次。。。依次类推
1号节点周围2次能到的节点集合,记作LM1(1)
Greedy Perimeter Stateless Routing (GPSR)
找路径的方法,具体咋贪的有以下几种方法
Greedy Forwarding:找离目标节点最近的
Nearest with Forwarding Progress (NFP):找离自己最近的
- Most Forwarding Progress within Radius (MFR):找方向投影最大的节点
- Compass Routing:找与目标方向夹角最小的
Localization
注意:
- accuracy和precision的区别:accuracy: 10m;precision: 90%
Ranging Techniques
Time of arrival (ToA)
又叫ToF
有 one-way 和 two-way 两种方法
one-way
A节点传给B节点A节点时钟当前时间,B节点用收到信息的B节点时钟时间 - A传的时间,再除以传播速度
two-way
A传B,B再回传A,俩时间取平均
- 即使俩始终时间不同步也准
Time Difference of Arrival (TDoA)
传两种信号
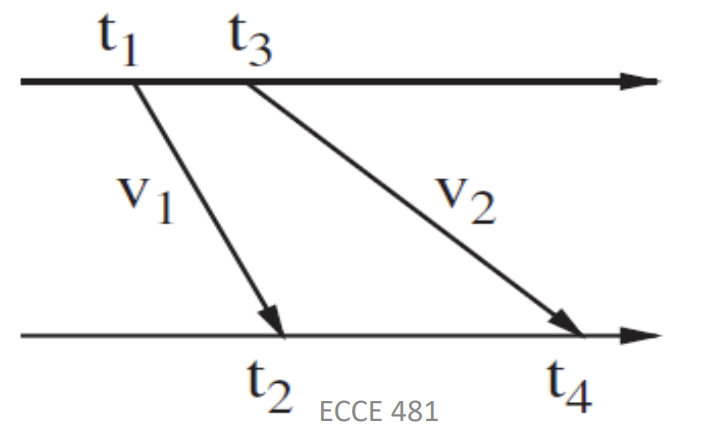
- 无需时钟同步
- t4 和 t2 都在B节点接收到
- 不用等第二个信号,随即传就行,快
- 但是需要两种hardware来传两种信号
Received Signal Strength (RSS)
通过信号强度估算距离
Gt 是 transmitter antenna gain,Gr 是 receiver antenna gain,λ 是 wavelength of transmitted signal。
但实际上,由于多径传播效应、反射、噪声等因素,距离与衰减不是平方关系,而在3到5之间,用n表示
补充:dB转换W
Range-based localization
前面讲了计算距离,现在通过距离计算xyz坐标
Trilateration
通过(不在同一直线的,已知位置的)三个点,到指定点的三个距离,确定一个点
不过由于误差,三个圆可能无法相较于一个点,因此要估算
后面又讲了啥没看懂
Triangulation(AoA)
用两个角度,确定一个点
GPS-based localization
Fully operational global navigation satellite system (GNSS)
Has three main competitors: Galileo, Beidou, GLONASS
Range-free localization
Ad Hoc Positioning System (APS)
计算单位节点距离,即 correction factor,来估算
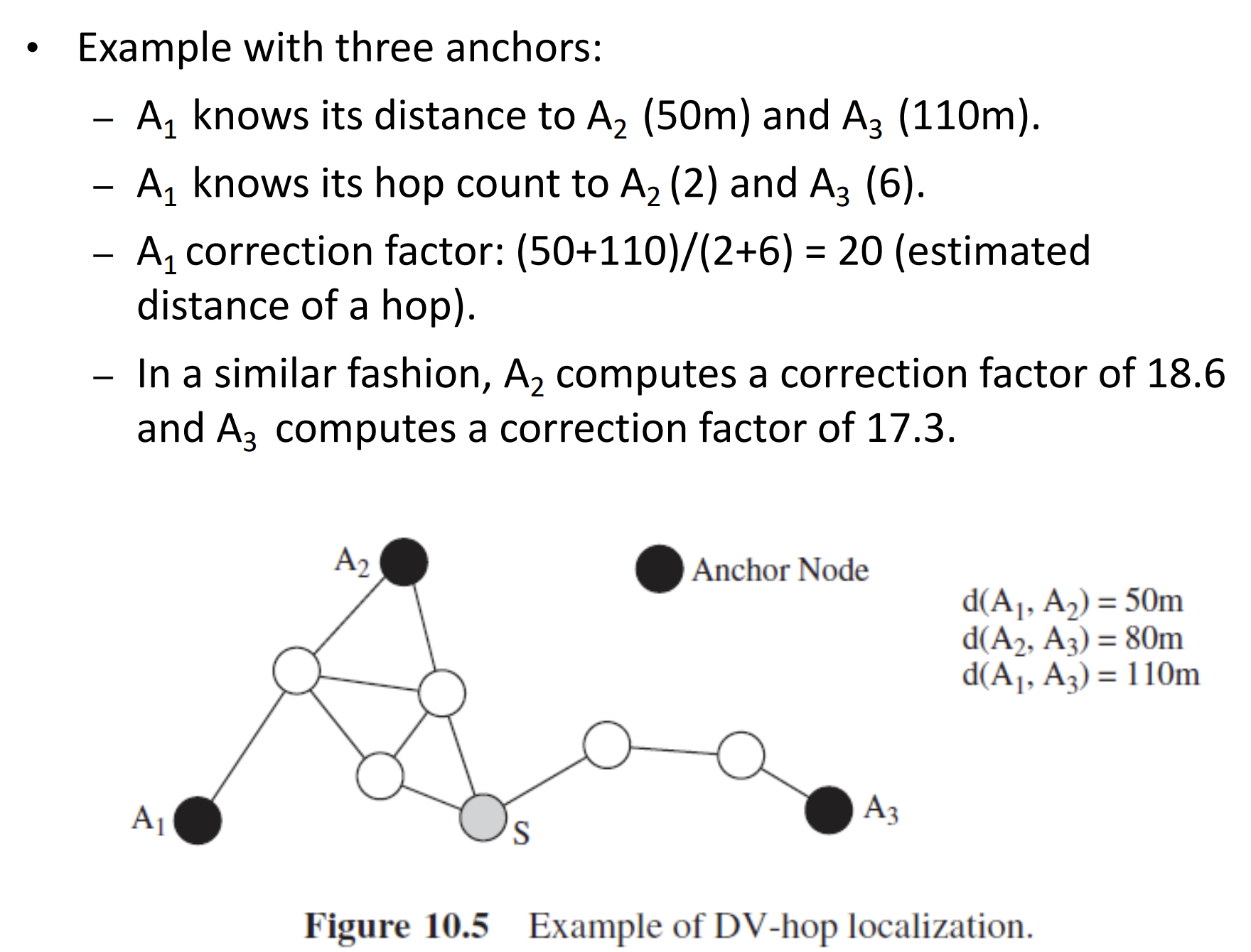
For example, sensor node S uses the correction factor obtained from A2 , that is, 18.6, to estimate its distances to the three anchors by multiplying the correction factor with the hop counts (leading to distances 3 × 18.6 to A1 , 2 × 18.6 to A2 , and 3 × 18.6 to A3 ). Given these distances, trilateration is used to determine the location.
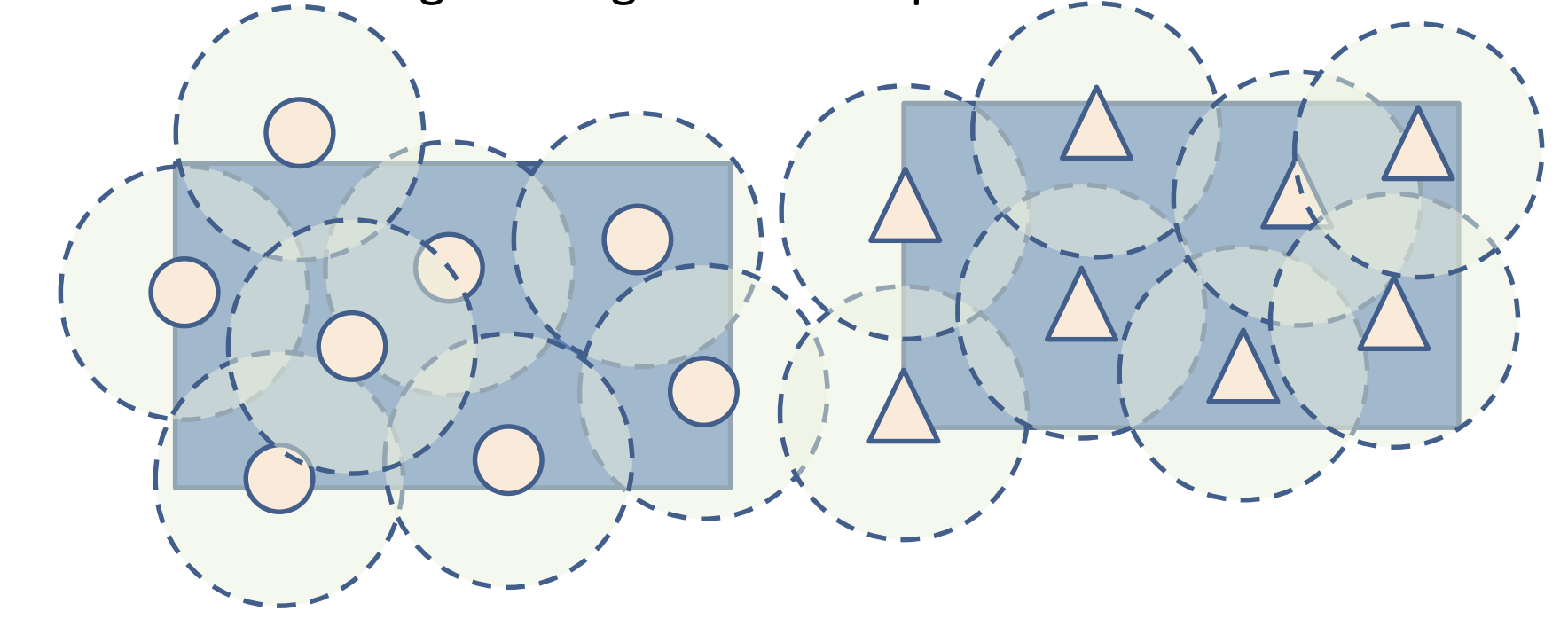
Approximate Point in Triangulation (APIT)
选三个已知点画三角形,判断所求点是否在三角形内,逐步缩小范围
通过“if there exists a direction such that a point adjacent to M is either further or closer to all points simultaneously”判断是否在三角形内
Event-driven localization
Lighthouse Approach
旋转光传感器,扫描灯塔,已知灯塔间距b
Multi-sequence Positioning (MSP)
Time Synchronization
- C(t) : 时钟的时间
- t: 现实时间
| 参数 | 概念 | 公式 | 描述 | ||
|---|---|---|---|---|---|
| clock offset | 两个时钟的时间差(偏置) | difference between the local times of two nodes | |||
| clock rate | 斜率 | dC(t)/dt | frequency at which a clock progresses | ||
| clock skew | 俩时钟的斜率差 | \ | dC1(t)/dt - dC2(t)/dt\ | difference in frequencies | |
| clock drift | 与现实时间1的斜率差 | dC(t)/dt-1 | difference between the ideal clock rate and the actual clock rate |
斜率差会导致两时钟偏差越来越大,因此需要定期同步:让慢的时钟加快
定期时间间隔为:
$\delta$ 是允许的最大时钟偏差,$\rho$ 是最大的 drift rate,单位是ppm (part per million)
调节方法是改变慢时钟的斜率变快。不能直接跳越时间,因为可能会导致错过触发条件。要保证 piecewise continuous 分段连续。
Types of Time Synchronization
- 外部同步
- 内部同步
如果外部同步,则必然内部同步,反之不一定。
- Accuracy: maximum offset of a clock with respect to reference clock.
- Precision: time resolution of a clock or maximum offset between any two clocks.
Time Synchronization in WSNs
。。。
Basics of Time Synchronization
调整时钟同步的方法是:两个两个同步,最终实现全部同步
One-Way Message Exchange
先根据距离计算传播延迟D,再通过发送时间戳、接收时间,反推offset δ
- 实际中,通常假设D为0或一个常数,很不精确
Two-Way Message Exchange
A从t1发,B在t2接,B又在t3发,A在t4接
- 假设两个方向传播延迟相同
- 假设时钟偏移在测量中没有变化
Receiver-Receiver Synchronization
一个sender,多个reciever,各个reciever之间同步
Lightweight Tree-Based Synchronization (LTS)
两两串联同步,同步误差会叠加。并联同步,同步误差不叠加。所以用树形。
Centralized multi-hop version of LTS
用breadth first search广度优先搜索生成树
一对同步需要2 messages;n个点同步:2n-2 messages
Distributed multi-hop version of LTS
Power Management
Energy is scarce(稀缺的),因为:
- nodes are very small in size
- impossible to manually change
- renewable energy and self-recharging mechanisms
节能方法包括使用节能协议,以及避免资源浪费,这节主要讲后者,主要包括:
- local:只影响本节点浪费。节点可能不需要监听信道,可以停止通信
- global:影响其他节点浪费。一个节点尝试与不存在的节点建立通道,使用AODV等方法会导致多个其他节点无意义的转发。影响更大。
所以这节讲的主要就是 DPM(dynamic power management)核心在于两点:
- 选择电源通断
- 决定系统工作模式
DPM也包括 local 和 global:
local:降低单个节点的能耗。
- 关闭不必要的子系统
- 休眠模式
global:
通过控制网络的睡眠状态,降低整体能耗
分拨睡觉和工作
Synchronous Sleeping Schedule
一组节点同时睡眠,睡觉前通知大家。
问题是同步反而会增加能耗。
Asynchronous Sleeping Schedule
所有人都睡觉,谁想发消息前要发一个 preamble
问题是会增长通信耗时
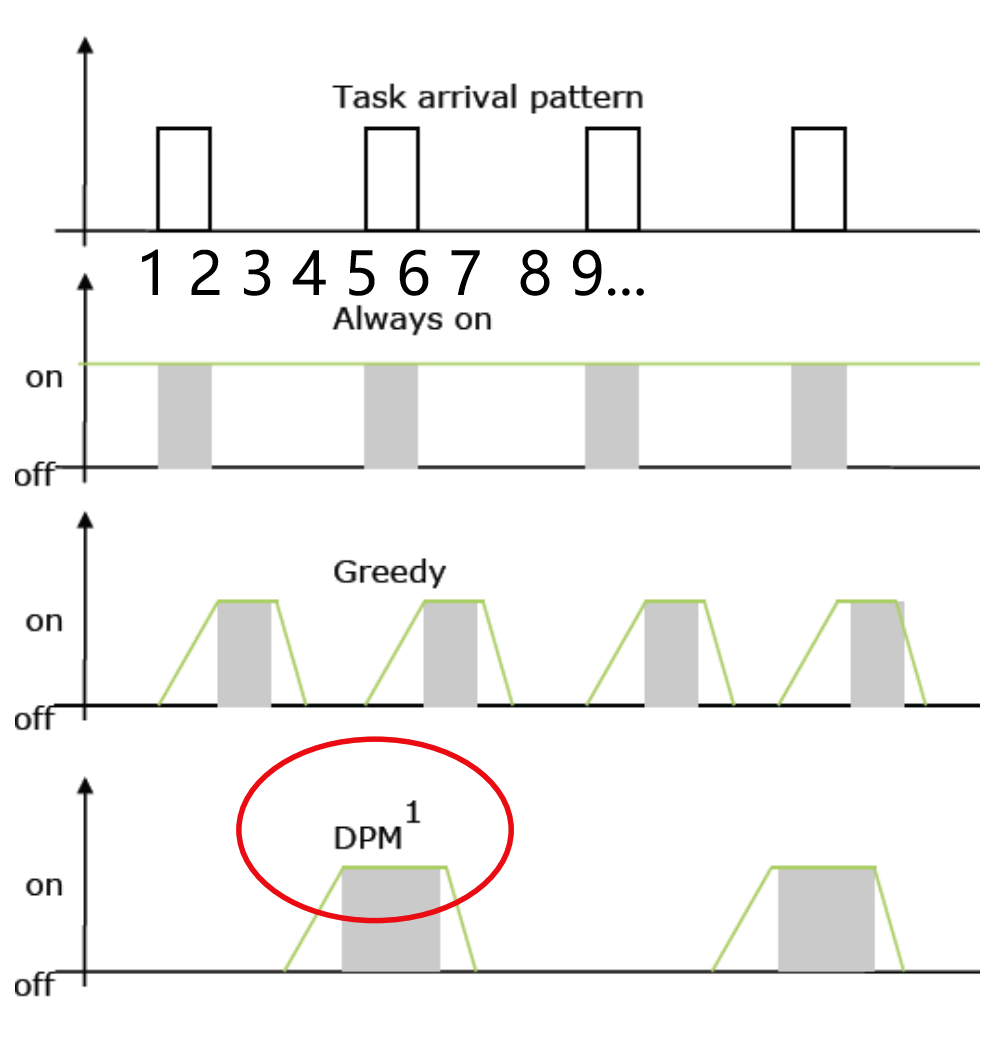
Dynamic Operation Modes
- 模式切换会花额外功耗
- 模式切换会花额外时间
| Parameter | Value |
|---|---|
| Pon | 10W |
| Poff | 0W |
| Pon-off | 10W |
| Poff-on | 40W |
| ton-off | 1s |
| toff-on | 2s |
| Policy | Energy | Avg. Latency |
|---|---|---|
| Always on | 250J | 1s |
| Reactive greedy | 240J | 3s |
| Power-aware | 140J | 2.5s |
多想多做,发篇一作